Events & Conferences
Why a Brazilian robotics expert moved to West Virginia to work on robots

When Guilherme A.S. Pereira arrived at the University of West Virginia from his native Brazil in 2018, he was focused on a single, long-term mission: moving prototype robotic concepts from his newly created Field and Aerial Robotics Laboratory into the real world in order to solve practical but complex commercial challenges. Under Pereira’s guidance, the lab is researching fundamental challenges facing ground and aerial robots as they operate in unknown and unstructured environments.
After 15 years teaching electrical engineering and computer science at Universidade Federal de Minas Gerais in Brazil, Pereira’s passion for robots led him to Morgantown where officials at WVU’s Department of Mechanical and Aerospace Engineering were envisioning robotics as a strategic growth area. There, as an associate professor, he would have a chance to push the field forward by tackling some of the fundamental obstacles accompanying the emergence of autonomous robots working alongside humans in the natural world.
For Pereira, Morgantown offers an ideal landing spot for his life’s work. He grew up in Minas Gerais, a mountainous region in southeast Brazil. He was fascinated by technology as a young student, taking electronics courses and tinkering with computers. He became fascinated by robots as an undergraduate and joined a robotics club to create soccer robots for competitions. After completing a master’s degree in robotics, he embraced the field.
Using robots to help people
While teaching at the university in Brazil, Pereira took a sabbatical in 2015 as a visiting scholar in the Robotics Institute at Carnegie-Mellon University in Pittsburgh. It was there that he decided it was time to permanently relocate to the U.S. WVU had several openings in robotics and when WVU’s Department of Mechanical and Aerospace Engineering offered him a post, he jumped at it.
In West Virginia, Pereira discovered a field experiment waiting to happen.
Courtesy of Guilherme Pereira
Famed for its coal mining industry, the state also mines 10 million tons of limestone each year. These mines are much larger and, Pereira noted, can be more dangerous than coal mines. Big trucks move about inside the mines, and the pillars that hold up the ceilings and walls must be inspected regularly for cracks and other damage that can lead to collapse.
Pereira and his students created a prototype of a robotic ground vehicle tethered to a drone to handle these dangerous tasks.
Pereira noted that those safety concerns mean robots are a better fit in some instances. His group has been in contact with some mining companies, as well as the university’s mining department, hoping to turn its prototype into a working model.
In addition, nearly 80 percent of West Virginia is covered by forest, and while the threat of fire is less common relative to western US forests, there are major problems created by invasive species of insects and plants. The team is creating a prototype of an autonomous robotic drone that can maneuver around the daunting mazes of trees and brush. Robotic inspection drones, zipping around the forest, searching for unwanted bugs and flora, is a goal, but it requires flawless navigation technology in a dynamic environment.
Using simulation, the lab is focused on trying to specify the trajectory of drone robots so they can navigate safely in the forest or inside mines, to avoid obstacles and people.
The rise of autonomous robots
Autonomous mobile robots have already staked a vital place in industrial applications, from manufacturing to transportation and delivery. These robots require frequent human interaction in order to program them to adapt to changing environments as well as keeping them charged and running. Put simply, the challenge of designing a way for robots to work autonomously is a daunting one.
One of the things we are trying to do is get data from an environment, and do very, very fast processing, so the robot can detect and avoid obstacles.
“Having robots working without human direction, for several days or weeks or years, is something we are worried about,” Pereira said. “The problem is that for a robot working long-term, say days at a time, the environment will change. Over years, the environment will change even more. In the forest, you will have plants and trees growing, seasonal changes, sometimes snow, sometimes sunshine, sometimes rain. And indoors, furniture gets moved around, people will be moving around, even other robots will present obstacles.
“If a robot recognizes a chair and table, it will know it’s in the dining room, for example. If that changes, the robot will have a rough time localizing itself and figuring that out.”
Pereira identified two key areas that required attention. For robots to work autonomously for long periods in changing environments, such as forests or mines, or anywhere where people are living and working, they must be able to adapt instantly. In order to do so, a massive amount of data must be processed in real time, something that is too compute-intensive to be done locally on the robot itself. So Pereira decided to focus his research on parallel and cloud computing, specifically mapping and motion planning, as a blueprint for building such robots.
Courtesy of Guilherme Pereira
By using the cloud, where there is an abundant supply of memory and processing power, maps of a changing environment can be pre-processed from the flow of data and transmitted to a robot in action. And computation aimed at plotting a robot’s motion using new motion planning algorithms can be done much faster in parallel with a robot’s CUDA-based on-board computer. CUDA (Compute Unified Device Architecture) is an inexpensive parallel computing platform and application programming interface.
“One of the things we are trying to do is get data from an environment, and do very, very fast processing, so the robot can detect and avoid obstacles,” Pereira explained.
Amazon Research Award
In 2019, Pereira received an Amazon Research Award for “Parallel and Cloud Computing for Long-Term Robotics.” The funds supported his research, and allowed him to add a PhD student, to help launch the project. The award also introduced his lab to Amazon Web Services (AWS), making his project the first one in his group to effectively apply cloud computation.
Everything I do is about having robots, not to replace people, but augment them, to help people with the kinds of repetitive tasks that robots can do better than people.
Pereira worked closely with Vamshi Konduri, an AWS senior solutions architect for robotics. Konduri’s team provides solutions and services to help customers build robotics equipped with capabilities such as critical intelligence, data/video processing, and analytics.
“The strategy that Guilherme was proposing in the research required tools to connect robots to the cloud, process data, and leverage smart computing capabilities, all of which AWS was well poised to provide with the breadth and depth of services we have to offer,” Konduri said.
Konduri was impressed with Pereira’s efforts. “He is forward thinking with pragmatic but cutting-edge research ideas,” Konduri said. “He is leveraging the progress and trends in other areas such as cloud computing.”
Pereira has embraced the challenges he sees in the future of his work. “One thing I eventually want to see are robots operating closely with people, working together,” Pereira said. “That is very hard to do now.”
“The big challenge is to make those robots intelligent in a way that people will be safe near them and the robots will actually help them,” he said. “I see robot farmers, delivery robots working for Amazon, robots you can trust to move among people. Everything I do is about having robots, not to replace people, but augment them, to help people with the kinds of repetitive tasks that robots can do better than people.”

















- We’re sharing how Meta is applying machine learning (ML) and diversity algorithms to improve notification quality and user experience.
- We’ve introduced a diversity-aware notification ranking framework to reduce uniformity and deliver a more varied and engaging mix of notifications.
- This new framework reduces the volume of notifications and drives higher engagement rates through more diverse outreach.
Notifications are one of the most powerful tools for bringing people back to Instagram and enhancing engagement. Whether it’s a friend liking your photo, another close friend posting a story, or a suggestion for a reel you might enjoy, notifications help surface moments that matter in real time.
Instagram leverages machine learning (ML) models to decide who should get a notification, when to send it, and what content to include. These models are trained to optimize for user positive engagement such as click-through-rate (CTR) – the probability of a user clicking a notification – as well as other metrics like time spent.
However, while engagement-optimized models are effective at driving interactions, there’s a risk that they might overprioritize the product types and authors someone has previously engaged with. This can lead to overexposure to the same creators or the same product types while overlooking other valuable and diverse experiences.
This means people could miss out on content that would give them a more balanced, satisfying, and enriched experience. Over time, this can make notifications feel spammy and increase the likelihood that people will disable them altogether.
The real challenge lies in finding the right balance: How can we introduce meaningful diversity into the notification experience without sacrificing the personalization and relevance people on Instagram have come to expect?
To tackle this, we’ve introduced a diversity-aware notification ranking framework that helps deliver more diverse, better curated, and less repetitive notifications. This framework has significantly reduced daily notification volume while improving CTR. It also introduces several benefits:
- The extensibility of incorporating customized soft penalty (demotion) logic for each dimension, enabling more adaptive and sophisticated diversity strategies.
- The flexibility of tuning demotion strength across dimensions like content, author, and product type via adjustable weights.
- The integration of balancing personalization and diversity, ensuring notifications remain both relevant and varied.
The Risks of Notifications without Diversity
The issue of overexposure in notifications often shows up in two major ways:
Overexposure to the same author: People might receive notifications that are mostly about the same friend. For example, if someone often interacts with content from a particular friend, the system may continue surfacing notifications from that person alone – ignoring other friends they also engage with. This can feel repetitive and one-dimensional, reducing the overall value of notifications.
Overexposure to the same product surface: People might mostly receive notifications from the same product surface such as Stories, even when Feed or Reels could provide value. For example, someone may be interested in both reel and story notifications but has recently interacted more often with stories. Because the system heavily prioritizes past engagement, it sends only story notifications, overlooking the person’s broader interests.
Introducing Instagram’s Diversity-Aware Notification Ranking Framework
Instagram’s diversity-aware notification ranking framework is designed to enhance the notification experience by balancing the predicted potential for user engagement with the need for content diversity. This framework introduces a diversity layer on top of the existing engagement ML models, applying multiplicative penalties to the candidate scores generated by these models, as figure1, below, shows.
The diversity layer evaluates each notification candidate’s similarity to recently sent notifications across multiple dimensions such as content, author, notification type, and product surface. It then applies carefully calibrated penalties—expressed as multiplicative demotion factors—to downrank candidates that are too similar or repetitive. The adjusted scores are used to re-rank the candidates, enabling the system to select notifications that maintain high engagement potential while introducing meaningful diversity. In the end, the quality bar selects the top-ranked candidate that passes both the ranking and diversity criteria.
Mathematical Formulation
Within the diversity layer, we apply a multiplicative demotion factor to the base relevance score of each candidate. Given a notification candidate 𝑐, we compute its final score as the product of its base ranking score and a diversity demotion multiplier:

where R(c) represents the candidate’s base relevance score, and D(c) ∈ [0,1] is a penalty factor that reduces the score based on similarity to recently sent notifications. We define a set of semantic dimensions (e.g., author, product type) along which we want to promote diversity. For each dimension i, we compute a similarity signal pi(c) between candidate c and the set of historical notifications H, using a maximal marginal relevance (MMR) approach:

where simi(·,·) is a predefined similarity function for dimension i. In our baseline implementation, pi(c) is binary: it equals 1 if the similarity exceeds a threshold 𝜏i and 0 otherwise.
The final demotion multiplier is defined as:

where each wi ∈ [0,1] controls the strength of demotion for its respective dimension. This formulation ensures that candidates similar to previously delivered notifications along one or more dimensions are proportionally down-weighted, reducing redundancy and promoting content variation. The use of a multiplicative penalty allows for flexible control across multiple dimensions, while still preserving high-relevance candidates.
The Future of Diversity-Aware Ranking
As we continue evolving our notification diversity-aware ranking system, a next step is to introduce more adaptive, dynamic demotion strategies. Instead of relying on static rules, we plan to make demotion strength responsive to notification volume and delivery timing. For example, as a user receives more notifications—especially of similar type or in rapid succession—the system progressively applies stronger penalties to new notification candidates, effectively mitigating overwhelming experiences caused by high notification volume or tightly spaced deliveries.
Longer term, we see an opportunity to bring large language models (LLMs) into the diversity pipeline. LLMs can help us go beyond surface-level rules by understanding semantic similarity between messages and rephrasing content in more varied, user-friendly ways. This would allow us to personalize notification experiences with richer language and improved relevance while maintaining diversity across topics, tone, and timing.

Every day, millions of customers search for books in various formats (audiobooks, e-books, and physical books) across Amazon and Audible. Traditional keyword autocomplete suggestions, while helpful, usually require several steps before customers find their desired content. Audible took on the challenge of making book discovery more intuitive and personalized while reducing the number of steps to purchase.
We developed an instant visual autocomplete system that enhances the search experience across Amazon and Audible. As the user begins typing a query, our solution provides visual previews with book covers, enabling direct navigation to relevant landing pages instead of the search result page. It also delivers real-time personalized format recommendations and incorporates multiple searchable entities, such as book pages, author pages, and series pages.
Our system needed to understand user intent from just a few keystrokes and determine the most relevant books to display, all while maintaining low latency for millions of queries. Using historical search data, we match keystrokes to products, transforming partial inputs into meaningful search suggestions. To ensure quality, we implemented confidence-based filtering mechanisms, which are particularly important for distinguishing between general queries like “mystery” and specific title searches. To reflect customers’ most recent interests, the system applies time-decay functions to long historical user interaction data.
To meet the unique requirements of each use case, we developed two distinct technical approaches. On Audible, we deployed a deep pairwise-learning-to-rank (DeepPLTR) model. The DeepPLTR model considers pairs of books and learns to assign a higher score to the one that better matches the customer query.
The DeepPLTR model’s architecture consists of three specialized towers. The left tower factors in contextual features and recent search patterns using a long-short-term-memory model, which processes data sequentially and considers its prior decisions when issuing a new term in the sequence. The middle tower handles keyword and item engagement history. The right tower factors in customer taste preferences and product descriptions to enable personalization. The model learns from paired examples, but at runtime, it relies on books’ absolute scores to assemble a ranked list.
For Amazon, we implemented a two-stage modeling approach involving a probabilistic information-retrieval model to determine the book title that best matches each keyword and a second model that personalizes the book format (audiobooks, e-books, and physical books). This dual-strategy approach maintains low latency while still enabling personalization.
In practice, a customer who types “dungeon craw” in the search bar now sees a visual recommendation for the book Dungeon Crawler Carl, complete with book cover, reducing friction by bypassing a search results page and sending the customer directly to the product detail page. On Audible, the system also personalizes autocomplete results and enriches the discovery experience with relevant connections. These include links to the author’s complete works (Matt Dinniman’s author page) and, for titles that belong to a series, links to the full collection (such as the Dungeon Crawler Carl series).

On Amazon, when the customer clicks on the title, the model personalizes the right book-format (audiobooks, e-books, physical books) recommendation and directs the customer to the right product detail page.
In both cases, after the customer has entered a certain number of keystrokes, the system employs a model to detect customer intent (e.g., book title intent for Amazon or author intent for Audible) and determine which visual widget should be displayed.
Audible and Amazon books’ visual autocomplete provides customers with more relevant content more rapidly than traditional autocomplete, and its direct navigation reduces the number of steps to find and access desired books — all while handling millions of queries at low latency.
This technology is not just about making book discovery easier; it is laying the foundation for future improvements in search personalization and visual discovery across Amazon’s ecosystem.
Acknowledgements: Jiun Kim, Sumit Khetan, Armen Stepanyan, Jack Xuan, Nathan Brothers, Eddie Chen, Vincent Lee, Soumy Ladha, Justine Luo, Yuchen Zeng, David Torres, Gali Deutsch, Chaitra Ramdas, Christopher Gomez, Sharmila Tamby, Melissa Ma, Cheng Luo, Jeffrey Jiang, Pavel Fedorov, Ronald Denaux, Aishwarya Vasanth, Azad Bajaj, Mary Heer, Adam Lowe, Jenny Wang, Cameron Cramer, Emmanuel Ankrah, Lydia Diaz, Suzette Islam, Fei Gu, Phil Weaver, Huan Xue, Kimmy Dai, Evangeline Yang, Chao Zhu, Anvy Tran, Jessica Wu, Xiaoxiong Huang, Jiushan Yang

Modern warehouses rely on complex networks of sensors to enable safe and efficient operations. These sensors must detect everything from packages and containers to robots and vehicles, often in changing environments with varying lighting conditions. More important for Amazon, we need to be able to detect barcodes in an efficient way.
The Amazon Robotics ID (ARID) team focuses on solving this problem. When we first started working on it, we faced a significant bottleneck: optimizing sensor placement required weeks or months of physical prototyping and real-world testing, severely limiting our ability to explore innovative solutions.
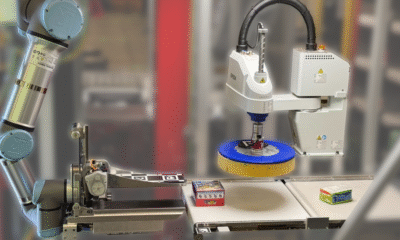
To transform this process, we developed Sensor Workbench (SWB), a sensor simulation platform built on NVIDIA’s Isaac Sim that combines parallel processing, physics-based sensor modeling, and high-fidelity 3-D environments. By providing virtual testing environments that mirror real-world conditions with unprecedented accuracy, SWB allows our teams to explore hundreds of configurations in the same amount of time it previously took to test just a few physical setups.
Camera and target selection/positioning
Sensor Workbench users can select different cameras and targets and position them in 3-D space to receive real-time feedback on barcode decodability.
Three key innovations enabled SWB: a specialized parallel-computing architecture that performs simulation tasks across the GPU; a custom CAD-to-OpenUSD (Universal Scene Description) pipeline; and the use of OpenUSD as the ground truth throughout the simulation process.
Parallel-computing architecture
Our parallel-processing pipeline leverages NVIDIA’s Warp library with custom computation kernels to maximize GPU utilization. By maintaining 3-D objects persistently in GPU memory and updating transforms only when objects move, we eliminate redundant data transfers. We also perform computations only when needed — when, for instance, a sensor parameter changes, or something moves. By these means, we achieve real-time performance.
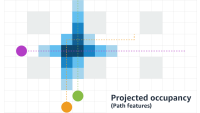
Visualization methods
Sensor Workbench users can pick sphere- or plane-based visualizations, to see how the positions and rotations of individual barcodes affect performance.
This architecture allows us to perform complex calculations for multiple sensors simultaneously, enabling instant feedback in the form of immersive 3-D visuals. Those visuals represent metrics that barcode-detection machine-learning models need to work, as teams adjust sensor positions and parameters in the environment.
CAD to USD
Our second innovation involved developing a custom CAD-to-OpenUSD pipeline that automatically converts detailed warehouse models into optimized 3-D assets. Our CAD-to-USD conversion pipeline replicates the structure and content of models created in the modeling program SolidWorks with a 1:1 mapping. We start by extracting essential data — including world transforms, mesh geometry, material properties, and joint information — from the CAD file. The full assembly-and-part hierarchy is preserved so that the resulting USD stage mirrors the CAD tree structure exactly.

To ensure modularity and maintainability, we organize the data into separate USD layers covering mesh, materials, joints, and transforms. This layered approach ensures that the converted USD file faithfully retains the asset structure, geometry, and visual fidelity of the original CAD model, enabling accurate and scalable integration for real-time visualization, simulation, and collaboration.
OpenUSD as ground truth
The third important factor was our novel approach to using OpenUSD as the ground truth throughout the entire simulation process. We developed custom schemas that extend beyond basic 3-D-asset information to include enriched environment descriptions and simulation parameters. Our system continuously records all scene activities — from sensor positions and orientations to object movements and parameter changes — directly into the USD stage in real time. We even maintain user interface elements and their states within USD, enabling us to restore not just the simulation configuration but the complete user interface state as well.
This architecture ensures that when USD initial configurations change, the simulation automatically adapts without requiring modifications to the core software. By maintaining this live synchronization between the simulation state and the USD representation, we create a reliable source of truth that captures the complete state of the simulation environment, allowing users to save and re-create simulation configurations exactly as needed. The interfaces simply reflect the state of the world, creating a flexible and maintainable system that can evolve with our needs.
Application
With SWB, our teams can now rapidly evaluate sensor mounting positions and verify overall concepts in a fraction of the time previously required. More importantly, SWB has become a powerful platform for cross-functional collaboration, allowing engineers, scientists, and operational teams to work together in real time, visualizing and adjusting sensor configurations while immediately seeing the impact of their changes and sharing their results with each other.
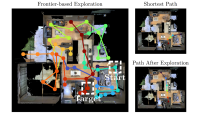
New perspectives
In projection mode, an explicit target is not needed. Instead, Sensor Workbench uses the whole environment as a target, projecting rays from the camera to identify locations for barcode placement. Users can also switch between a comprehensive three-quarters view and the perspectives of individual cameras.
Due to the initial success in simulating barcode-reading scenarios, we have expanded SWB’s capabilities to incorporate high-fidelity lighting simulations. This allows teams to iterate on new baffle and light designs, further optimizing the conditions for reliable barcode detection, while ensuring that lighting conditions are safe for human eyes, too. Teams can now explore various lighting conditions, target positions, and sensor configurations simultaneously, gleaning insights that would take months to accumulate through traditional testing methods.

Looking ahead, we are working on several exciting enhancements to the system. Our current focus is on integrating more-advanced sensor simulations that combine analytical models with real-world measurement feedback from the ARID team, further increasing the system’s accuracy and practical utility. We are also exploring the use of AI to suggest optimal sensor placements for new station designs, which could potentially identify novel configurations that users of the tool might not consider.
Additionally, we are looking to expand the system to serve as a comprehensive synthetic-data generation platform. This will go beyond just simulating barcode-detection scenarios, providing a full digital environment for testing sensors and algorithms. This capability will let teams validate and train their systems using diverse, automatically generated datasets that capture the full range of conditions they might encounter in real-world operations.
By combining advanced scientific computing with practical industrial applications, SWB represents a significant step forward in warehouse automation development. The platform demonstrates how sophisticated simulation tools can dramatically accelerate innovation in complex industrial systems. As we continue to enhance the system with new capabilities, we are excited about its potential to further transform and set new standards for warehouse automation.
-

 Business5 days ago
Business5 days agoThe Guardian view on Trump and the Fed: independence is no substitute for accountability | Editorial
-
Tools & Platforms3 weeks ago
Building Trust in Military AI Starts with Opening the Black Box – War on the Rocks
-

 Ethics & Policy1 month ago
Ethics & Policy1 month agoSDAIA Supports Saudi Arabia’s Leadership in Shaping Global AI Ethics, Policy, and Research – وكالة الأنباء السعودية
-

 Events & Conferences4 months ago
Events & Conferences4 months agoJourney to 1000 models: Scaling Instagram’s recommendation system
-

 Jobs & Careers2 months ago
Jobs & Careers2 months agoMumbai-based Perplexity Alternative Has 60k+ Users Without Funding
-

 Education2 months ago
Education2 months agoVEX Robotics launches AI-powered classroom robotics system
-

 Funding & Business2 months ago
Funding & Business2 months agoKayak and Expedia race to build AI travel agents that turn social posts into itineraries
-

 Podcasts & Talks2 months ago
Podcasts & Talks2 months agoHappy 4th of July! 🎆 Made with Veo 3 in Gemini
-

 Podcasts & Talks2 months ago
Podcasts & Talks2 months agoOpenAI 🤝 @teamganassi
-

 Education2 months ago
Education2 months agoAERDF highlights the latest PreK-12 discoveries and inventions