Connect with us

Ray, T. R. et al. Bio-integrated wearable systems: a comprehensive review. Chem. Rev. 119, 5461–5533 (2019). Article Google Scholar Kim, J., Campbell, A. S., de Ávila,...



Research on physical AI for autonomous systems at Korea University Nature Source link



This research builds upon and extends the workflow for mapping vegetation in Antarctica, initially proposed by Sandino et al.28, by incorporating UAV-acquired HSI data. The dataset...
Here we delve into the implementation of proactive trajectory modulation as a means of slip control, which addresses our first hypothesis. We present the methodology and...



Control framework overview At the core of this work, the Unitree A1 quadruped robot used in all experiments features 12 degrees of freedom, n, which are...
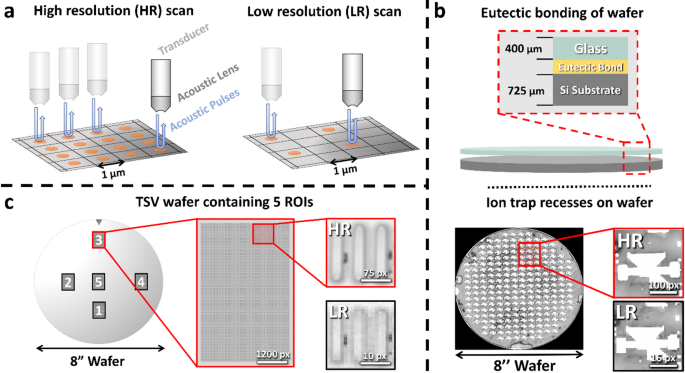


SAM measurement and data generation We utilize C-Scan SAM to generate the experimental data. Figure 1a shows the basic working principle of a SAM device. The transducer...

For dataset generation, a rapid and accurate analytical model is essential to efficiently produce a large amount of data within a short timeframe. Two well-established approaches...