Events & Conferences
Amazon announces Ocelot quantum chip

Today we are happy to announce Ocelot, our first-generation quantum chip. Ocelot represents Amazon Web Services’ pioneering effort to develop, from the ground up, a hardware implementation of quantum error correction that is both resource efficient and scalable. Based on superconducting quantum circuits, Ocelot achieves the following major technical advances:
- The first realization of a scalable architecture for bosonic error correction, surpassing traditional qubit approaches to reducing error correction overhead;
- The first implementation of a noise-biased gate — a key to unlocking the type of hardware-efficient error correction necessary for building scalable, commercially viable quantum computers;
- State-of-the-art performance for superconducting qubits, with bit-flip times approaching one second in tandem with phase-flip times of 20 microseconds.
We believe that scaling Ocelot to a full-fledged quantum computer capable of transformative societal impact would require as little as one-tenth as many resources as common approaches, helping bring closer the age of practical quantum computing.
The quantum performance gap
Quantum computers promise to perform some computations much faster — even exponentially faster — than classical computers. This means quantum computers can solve some problems that are forever beyond the reach of classical computing.
Practical applications of quantum computing will require sophisticated quantum algorithms with billions of quantum gates — the basic operations of a quantum computer. But current quantum computers’ extreme sensitivity to environmental noise means that the best quantum hardware today can run only about a thousand gates without error. How do we bridge this gap?
Quantum error correction: the key to reliable quantum computing
Quantum error correction, first proposed theoretically in the 1990s, offers a solution. By sharing the information in each logical qubit across multiple physical qubits, one can protect the information within a quantum computer from external noise. Not only this, but errors can be detected and corrected in a manner analogous to the classical error correction methods used in digital storage and communication.
Recent experiments have demonstrated promising progress, but today’s best logical qubits, based on superconducting or atomic qubits, still exhibit error rates a billion times larger than the error rates needed for known quantum algorithms of practical utility and quantum advantage.
The challenge of qubit overhead
While quantum error correction provides a path to bridging the enormous chasm between today’s error rates and those required for practical quantum computation, it comes with a severe penalty in terms of resource overhead. Reducing logical-qubit error rates requires scaling up the redundancy in the number of physical qubits per logical qubit.
Traditional quantum error correction methods, such as those using the surface error-correcting code, currently require thousands (and if we work really, really hard, maybe in the future, hundreds) of physical qubits per logical qubit to reach the desired error rates. That means that a commercially relevant quantum computer would require millions of physical qubits — many orders of magnitude beyond the qubit count of current hardware.
One fundamental reason for this high overhead is that quantum systems experience two types of errors: bit-flip errors (also present in classical bits) and phase-flip errors (unique to qubits). Whereas classical bits require only correction of bit flips, qubits require an additional layer of redundancy to handle both types of errors.
Although subtle, this added complexity leads to quantum systems’ large resource overhead requirement. For comparison, a good classical error-correcting code could realize the error rate we desire for quantum computing with less than 30% overhead, roughly one-ten-thousandth the overhead of the conventional surface code approach (assuming bit error rates of 0.5%, similar to qubit error rates in current hardware).
Cat qubits: an approach to more efficient error correction
Quantum systems in nature can be more complex than qubits, which consist of just two quantum states (usually labeled 0 and 1 in analogy to classical digital bits). Take for example the simple harmonic oscillator, which oscillates with a well-defined frequency. Harmonic oscillators come in all sorts of shapes and sizes, from the mechanical metronome used to keep time while playing music to the microwave electromagnetic oscillators used in radar and communication systems.
Classically, the state of an oscillator can be represented by the amplitude and phase of its oscillations. Quantum mechanically, the situation is similar, although the amplitude and phase are never simultaneously perfectly defined, and there is an underlying graininess to the amplitude associated with each quanta of energy one adds to the system.
These quanta of energy are what are called bosonic particles, the best known of which is the photon, associated with the electromagnetic field. The more energy we pump into the system, the more bosons (photons) we create, and the more oscillator states (amplitudes) we can access. Bosonic quantum error correction, which relies on bosons instead of simple two-state qubit systems, uses these extra oscillator states to more effectively protect quantum information from environmental noise and to do more efficient error correction.
One type of bosonic quantum error correction uses cat qubits, named after the dead/alive Schrödinger cat of Erwin Schrödinger’s famous thought experiment. Cat qubits use the quantum superposition of classical-like states of well-defined amplitude and phase to encode a qubit’s worth of information. Just a few years after Peter Shor’s seminal 1995 paper on quantum error correction, researchers began quietly developing an alternative approach to error correction based on cat qubits.
A major advantage of cat qubits is their inherent protection against bit-flip errors. Increasing the number of photons in the oscillator can make the rate of the bit-flip errors exponentially small. This means that instead of increasing qubit count, we can simply increase the energy of an oscillator, making error correction far more efficient.
The past decade has seen pioneering experiments demonstrating the potential of cat qubits. However, these experiments have mostly focused on single-cat-qubit demonstrations, leaving open the question of whether cat qubits could be integrated into a scalable architecture.
Ocelot: demonstrating the scalability of bosonic quantum error correction
Today in Nature, we published the results of our measurements on Ocelot, and its quantum error correction performance. Ocelot represents an important step on the road to practical quantum computers, leveraging chip-scale integration of cat qubits to form a scalable, hardware-efficient architecture for quantum error correction. In this approach,
- bit-flip errors are exponentially suppressed at the physical-qubit level;
- phase-flip errors are corrected using a repetition code, the simplest classical error-correcting code; and
- highly noise-biased controlled-NOT (C-NOT) gates, between each cat qubit and ancillary transmon qubits (the conventional qubit used in superconducting quantum circuits), enable phase-flip-error detection while preserving the cat’s bit-flip protection.
The Ocelot logical-qubit memory chip, shown schematically above, consists of five cat data qubits, each housing an oscillator that is used to store the quantum data. The storage oscillator of each cat qubit is connected to two ancillary transmon qubits for phase-flip-error detection and paired with a special nonlinear buffer circuit used to stabilize the cat qubit states and exponentially suppress bit-flip errors.
Tuning up the Ocelot device involves calibrating the bit- and phase-flip error rates of the cat qubits against the cat amplitude (average photon number) and optimizing the noise-bias of the C-NOT gate used for phase-flip-error detection. Our experimental results show that we can achieve bit-flip times approaching one second, more than a thousand times longer than the lifetime of conventional superconducting qubits.
Critically, this can be accomplished with a cat amplitude as small as four photons, enabling us to retain phase-flip times of tens of microseconds, sufficient for quantum error correction. From there, we run a sequence of error correction cycles to test the performance of the circuit as a logical-qubit memory. In order to characterize the performance of the repetition code and the scalability of the architecture, we studied subsets of the Ocelot cat qubits, representing different repetition code lengths.
The logical phase-flip error rate was seen to drop significantly when the code distance was increased from distance-3 to distance-5 (i.e., from a code with three cat qubits to one with five) across a wide range of cat photon numbers, indicating the effectiveness of the repetition code.
When bit-flip errors were included, the total logical error rate was measured to be 1.72% per cycle for the distance-3 code and 1.65% per cycle for the distance-5 code. The comparability of the total error rate of the distance-5 code to that of the shorter distance-3 code, with fewer cat qubits and opportunities for bit-flip errors, can be attributed to the large noise bias of the C-NOT gate and its effectiveness in suppressing bit-flip errors. This noise bias is what allows Ocelot to achieve a distance-5 code with less than a fifth as many qubits — five data qubits and four ancilla qubits, versus 49 qubits for a surface code device.
What we scale matters
From the billions of transistors in a modern GPU to the massive-scale GPU clusters powering AI models, the ability to scale efficiently is a key driver of technological progress. Similarly, scaling the number of qubits to accommodate the overhead required of quantum error correction will be key to realizing commercially valuable quantum computers.
But the history of computing shows that scaling the right component can have massive consequences for cost, performance, and even feasibility. The computer revolution truly took off when the transistor replaced the vacuum tube as the fundamental building block to scale.
Ocelot represents our first chip with the cat qubit architecture, and an initial test of its suitability as a fundamental building block for implementing quantum error correction. Future versions of Ocelot are being developed that will exponentially drive down logical error rates, enabled by both an improvement in component performance and an increase in code distance.
Codes tailored to biased noise, such as the repetition code used in Ocelot, can significantly reduce the number of physical qubits required. In our forthcoming paper “Hybrid cat-transmon architecture for scalable, hardware-efficient quantum error correction”, we find that scaling Ocelot could reduce quantum error correction overhead by up to 90% compared to conventional surface code approaches with similar physical-qubit error rates.
We believe that Ocelot’s architecture, with its hardware-efficient approach to error correction, positions us well to tackle the next phase of quantum computing: learning how to scale. Using a hardware-efficient approach will allow us to more quickly and cost effectively achieve an error-corrected quantum computer that benefits society.
Over the last few years, quantum computing has entered an exciting new era in which quantum error correction has moved from the blackboard to the test bench. With Ocelot, we are just beginning down a path to fault-tolerant quantum computation. For those interested in joining us on this journey, we are hiring for positions across our quantum computing stack. Visit Amazon Jobs and enter the keyword “quantum”.

Modern warehouses rely on complex networks of sensors to enable safe and efficient operations. These sensors must detect everything from packages and containers to robots and vehicles, often in changing environments with varying lighting conditions. More important for Amazon, we need to be able to detect barcodes in an efficient way.
The Amazon Robotics ID (ARID) team focuses on solving this problem. When we first started working on it, we faced a significant bottleneck: optimizing sensor placement required weeks or months of physical prototyping and real-world testing, severely limiting our ability to explore innovative solutions.
To transform this process, we developed Sensor Workbench (SWB), a sensor simulation platform built on NVIDIA’s Isaac Sim that combines parallel processing, physics-based sensor modeling, and high-fidelity 3-D environments. By providing virtual testing environments that mirror real-world conditions with unprecedented accuracy, SWB allows our teams to explore hundreds of configurations in the same amount of time it previously took to test just a few physical setups.
Camera and target selection/positioning
Sensor Workbench users can select different cameras and targets and position them in 3-D space to receive real-time feedback on barcode decodability.
Three key innovations enabled SWB: a specialized parallel-computing architecture that performs simulation tasks across the GPU; a custom CAD-to-OpenUSD (Universal Scene Description) pipeline; and the use of OpenUSD as the ground truth throughout the simulation process.
Parallel-computing architecture
Our parallel-processing pipeline leverages NVIDIA’s Warp library with custom computation kernels to maximize GPU utilization. By maintaining 3-D objects persistently in GPU memory and updating transforms only when objects move, we eliminate redundant data transfers. We also perform computations only when needed — when, for instance, a sensor parameter changes, or something moves. By these means, we achieve real-time performance.
Visualization methods
Sensor Workbench users can pick sphere- or plane-based visualizations, to see how the positions and rotations of individual barcodes affect performance.
This architecture allows us to perform complex calculations for multiple sensors simultaneously, enabling instant feedback in the form of immersive 3-D visuals. Those visuals represent metrics that barcode-detection machine-learning models need to work, as teams adjust sensor positions and parameters in the environment.
CAD to USD
Our second innovation involved developing a custom CAD-to-OpenUSD pipeline that automatically converts detailed warehouse models into optimized 3-D assets. Our CAD-to-USD conversion pipeline replicates the structure and content of models created in the modeling program SolidWorks with a 1:1 mapping. We start by extracting essential data — including world transforms, mesh geometry, material properties, and joint information — from the CAD file. The full assembly-and-part hierarchy is preserved so that the resulting USD stage mirrors the CAD tree structure exactly.

To ensure modularity and maintainability, we organize the data into separate USD layers covering mesh, materials, joints, and transforms. This layered approach ensures that the converted USD file faithfully retains the asset structure, geometry, and visual fidelity of the original CAD model, enabling accurate and scalable integration for real-time visualization, simulation, and collaboration.
OpenUSD as ground truth
The third important factor was our novel approach to using OpenUSD as the ground truth throughout the entire simulation process. We developed custom schemas that extend beyond basic 3-D-asset information to include enriched environment descriptions and simulation parameters. Our system continuously records all scene activities — from sensor positions and orientations to object movements and parameter changes — directly into the USD stage in real time. We even maintain user interface elements and their states within USD, enabling us to restore not just the simulation configuration but the complete user interface state as well.
This architecture ensures that when USD initial configurations change, the simulation automatically adapts without requiring modifications to the core software. By maintaining this live synchronization between the simulation state and the USD representation, we create a reliable source of truth that captures the complete state of the simulation environment, allowing users to save and re-create simulation configurations exactly as needed. The interfaces simply reflect the state of the world, creating a flexible and maintainable system that can evolve with our needs.
Application
With SWB, our teams can now rapidly evaluate sensor mounting positions and verify overall concepts in a fraction of the time previously required. More importantly, SWB has become a powerful platform for cross-functional collaboration, allowing engineers, scientists, and operational teams to work together in real time, visualizing and adjusting sensor configurations while immediately seeing the impact of their changes and sharing their results with each other.
New perspectives
In projection mode, an explicit target is not needed. Instead, Sensor Workbench uses the whole environment as a target, projecting rays from the camera to identify locations for barcode placement. Users can also switch between a comprehensive three-quarters view and the perspectives of individual cameras.
Due to the initial success in simulating barcode-reading scenarios, we have expanded SWB’s capabilities to incorporate high-fidelity lighting simulations. This allows teams to iterate on new baffle and light designs, further optimizing the conditions for reliable barcode detection, while ensuring that lighting conditions are safe for human eyes, too. Teams can now explore various lighting conditions, target positions, and sensor configurations simultaneously, gleaning insights that would take months to accumulate through traditional testing methods.

Looking ahead, we are working on several exciting enhancements to the system. Our current focus is on integrating more-advanced sensor simulations that combine analytical models with real-world measurement feedback from the ARID team, further increasing the system’s accuracy and practical utility. We are also exploring the use of AI to suggest optimal sensor placements for new station designs, which could potentially identify novel configurations that users of the tool might not consider.
Additionally, we are looking to expand the system to serve as a comprehensive synthetic-data generation platform. This will go beyond just simulating barcode-detection scenarios, providing a full digital environment for testing sensors and algorithms. This capability will let teams validate and train their systems using diverse, automatically generated datasets that capture the full range of conditions they might encounter in real-world operations.
By combining advanced scientific computing with practical industrial applications, SWB represents a significant step forward in warehouse automation development. The platform demonstrates how sophisticated simulation tools can dramatically accelerate innovation in complex industrial systems. As we continue to enhance the system with new capabilities, we are excited about its potential to further transform and set new standards for warehouse automation.
The Kotlin incremental compiler has been a true gem for developers chasing faster compilation since its introduction in build tools. Now, we’re excited to bring its benefits to Buck2 – Meta’s build system – to unlock even more speed and efficiency for Kotlin developers.
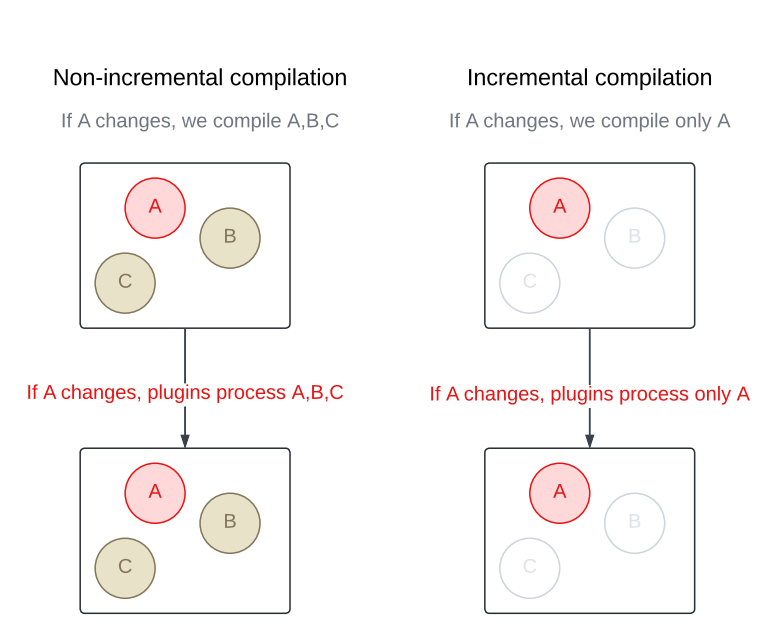
Unlike a traditional compiler that recompiles an entire module every time, an incremental compiler focuses only on what was changed. This cuts down compilation time in a big way, especially when modules contain a large number of source files.
Buck2 promotes small modules as a key strategy for achieving fast build times. Our codebase followed that principle closely, and for a long time, it worked well. With only a handful of files in each module, and Buck2’s support for fast incremental builds and parallel execution, incremental compilation didn’t seem like something we needed.
But, let’s be real: Codebases grow, teams change, and reality sometimes drifts away from the original plan. Over time, some modules started getting bigger – either from legacy or just organic growth. And while big modules were still the exception, they started having quite an impact on build times.
So we gave the Kotlin incremental compiler a closer look – and we’re glad we did. The results? Some critical modules now build up to 3x faster. That’s a big win for developer productivity and overall build happiness.
Curious about how we made it all work in Buck2? Keep reading. We’ll walk you through the steps we took to bring the Kotlin incremental compiler to life in our Android toolchain.
Step 1: Integrating Kotlin’s Build Tools API
As of Kotlin 2.2.0, the only guaranteed public contract to use the compiler is through the command-line interface (CLI). But since the CLI doesn’t support incremental compilation (at least for now), it didn’t meet our needs. Alternatively, we could integrate the Kotlin incremental compiler directly via the internal compiler’s components – APIs that are technically accessible but not intended for public use. However, relying on them would’ve made our toolchain fragile and likely to break with every Kotlin update since there’s no guarantee of backward compatibility. That didn’t seem like the right path either.
Then we came across the Build Tools API (KEEP), introduced in Kotlin 1.9.20 as the official integration point for the compiler – including support for incremental compilation. Although the API was still marked as experimental, we decided to give it a try. We knew it would eventually stabilize, and saw it as a great opportunity to get in early, provide feedback, and help shape its direction. Compared to using internal components, it offered a far more sustainable and future-proof approach to integration.
⚠️ Depending on kotlin-compiler? Watch out!
In the Java world, a shaded library is a modified version of the library where the class and package names are changed. This process – called shading – is a handy way to avoid classpath conflicts, prevent version clashes between libraries, and keeps internal details from leaking out.
Here’s quick example:
- Unshaded (original) class: com.intellij.util.io.DataExternalizer
- Shaded class: org.jetbrains.kotlin.com.intellij.util.io.DataExternalizer
The Build Tools API depends on the shaded version of the Kotlin compiler (kotlin-compiler-embeddable). But our Android toolchain was historically built with the unshaded one (kotlin-compiler). That mismatch led to java.lang.NoClassDefFoundError crashes when testing the integration because the shaded classes simply weren’t on the classpath.
Replacing the unshaded compiler across the entire Android toolchain would’ve been a big effort. So to keep moving forward, we went with a quick workaround: We unshaded the Build Tools API instead. 🙈 Using the jarjar library, we stripped the org.jetbrains.kotlin prefix from class names and rebuilt the library.
Don’t worry, once we had a working prototype and confirmed everything behaved as expected, we circled back and did it right – fully migrating our toolchain to use the shaded Kotlin compiler. That brought us back in line with the API’s expectations and gave us a more stable setup for the future.
Step 2: Keeping previous output around for the incremental compiler
To compile incrementally, the Kotlin compiler needs access to the output from the previous build. Simple enough, but Buck2 deletes that output by default before rebuilding a module.
With incremental actions, you can configure Buck2 to skip the automatic cleanup of previous outputs. This gives your build actions access to everything from the last run. The tradeoff is that it’s now up to you to figure out what’s still useful and manually clean up the rest. It’s a bit more work, but it’s exactly what we needed to make incremental compilation possible.
Step 3: Making the incremental compiler cache relocatable
At first, this might not seem like a big deal. You’re not planning to move your codebase around, so why worry about making the cache relocatable, right?
Well… that’s until you realize you’re no longer in a tiny team, and you’re definitely not the only one building the project. Suddenly, it does matter.
Buck2 supports distributed builds, which means your builds don’t have to run only on your local machine. They can be executed elsewhere, with the results sent back to you. And if your compiler cache isn’t relocatable, this setup can quickly lead to trouble – from conflicting overloads to strange ambiguity errors caused by mismatched paths in cached data.
So we made sure to configure the root project directory and the build directory explicitly in the incremental compilation settings. This keeps the compiler cache stable and reliable, no matter who runs the build or where it happens.
Step 4: Configuring the incremental compiler
In a nutshell, to decide what needs to be recompiled, the Kotlin incremental compiler looks for changes in two places:
- Files within the module being rebuilt.
- The module’s dependencies.
Once the changes are found, the compiler figures out which files in the module are affected – whether by direct edits or through updated dependencies – and recompiles only those.
To get this process rolling, the compiler needs just a little nudge to understand how much work it really has to do.
So let’s give it that nudge!
Tracking changes inside the module
When it comes to tracking changes, you’ve got two options: You can either let the compiler do its magic and detect changes automatically, or you can give it a hand by passing a list of modified files yourself. The first option is great if you don’t know which files have changed or if you just want to get something working quickly (like we did during prototyping). However, if you’re on a Kotlin version earlier than 2.1.20, you have to provide this information yourself. Automatic source change detection via the Build Tools API isn’t available prior to that. Even with newer versions, if the build tool already has the change list before compilation, it’s still worth using it to optimize the process.
This is where Buck’s incremental actions come in handy again! Not only can we preserve the output from the previous run, but we also get hash digests for every action input. By comparing those hashes with the ones from the last build, we can generate a list of changed files. From there, we pass that list to the compiler to kick off incremental compilation right away – no need for the compiler to do any change detection on its own.
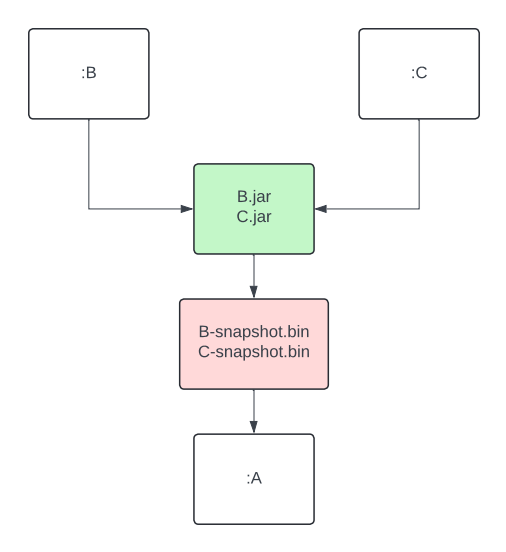
Tracking changes in dependencies
Sometimes it’s not the module itself that changes, it’s something the module depends on. In these cases, the compiler relies on classpath snapshot. These snapshots capture the Application Binary Interface (ABI) of a library. By comparing the current snapshots to the previous one, the compiler can detect changes in dependencies and figure out which files in your module are affected. This adds an extra layer of filtering on top of standard compilation avoidance.
In Buck2, we added a dedicated action to generate classpath snapshots from library outputs. This artifact is then passed as an input to the consuming module, right alongside the library’s compiled output. The best part? Since it’s a separate action, it can be run remotely or be pulled from cache, so your machine doesn’t have to do the heavy lifting of extracting ABI at this step.
If, after all, only your module changes but your dependencies do not, the API also lets you skip the snapshot comparison entirely if your build tool handles the dependency analysis on its own. Since we already had the necessary data from Buck2’s incremental actions, adding this optimization was almost free.
Step 5: Making compiler plugins work with the incremental compiler
One of the biggest challenges we faced when integrating the incremental compiler was making it play nicely with our custom compiler plugins, many of which are important to our build optimization strategy. This step was necessary for unlocking the full performance benefits of incremental compilation, but it came with two major issues we needed to solve.
🚨 Problem 1: Incomplete results
As we already know, the input to the incremental compiler does not have to include all Kotlin source files. Our plugins weren’t designed for this and ended up producing incomplete results when run on just a subset of files. We had to make them incremental as well so they could handle partial inputs correctly.
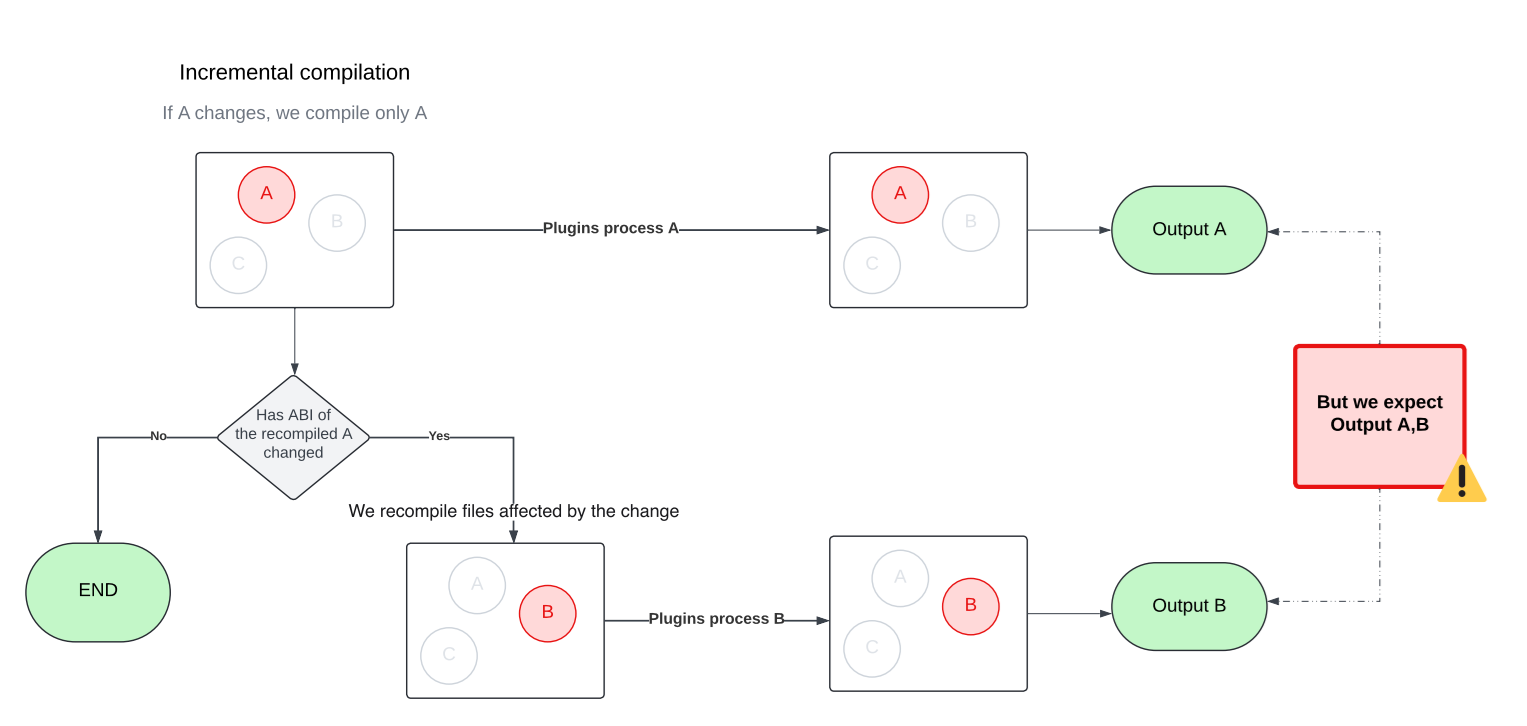
🚨 Problem 2: Multiple rounds of Compilation
The Kotlin incremental compiler doesn’t just recompile the files that changed in a module. It may also need to recompile other files in the same module that are affected by those changes. Figuring out the exact set of affected files is tricky, especially when circular dependencies come into play. To handle this, the incremental compiler approximates the affected set by compiling in multiple rounds within a single build.
💡Curious how that works under the hood? The Kotlin blog on fast compilation has a great deep dive that’s worth checking out.
This behavior comes with a side effect, though. Since the compiler may run in multiple rounds with different sets of files, compiler plugins can also be triggered multiple times, each time with a different input. That can be problematic, as later plugin runs may override outputs produced by earlier ones. To avoid this, we updated our plugins to accumulate their results across rounds rather than replacing them.
Step 6: Verifying the functionality of annotation processors
Most of our annotation processors use Kotlin Symbol Processing (KSP2), which made this step pretty smooth. KSP2 is designed as a standalone tool that uses the Kotlin Analysis API to analyze source code. Unlike compiler plugins, it runs independently from the standard compilation flow. Thanks to this setup, we were able to continue using KSP2 without any changes.
💡 Bonus: KSP2 comes with its own built-in incremental processing support. It’s fully self-contained and doesn’t depend on the incremental compiler at all.
Before we adopted KSP2 (or when we were using an older version of the Kotlin Annotation Processing Tool (KAPT), which operates as a plugin) our annotation processors ran in a separate step dedicated solely to annotation processing. That step ran before the main compilation and was always non-incremental.
Step 7: Enabling compilation against ABI
To maximize cache hits, Buck2 builds Android modules against the class ABI instead of the full JAR. For Kotlin targets, we use the jvm-abi-gen compiler plugin to generate class ABI during compilation.
But once we turned on incremental compilation, a couple of new challenges popped up:
- The jvm-abi-gen plugin currently lacks direct support for incremental compilation, which ties back to the issues we mentioned earlier with compiler plugins.
- ABI extraction now happens twice – once during compilation via jvm-abi-gen, and again when the incremental compiler creates classpath snapshots.
In theory, both problems could be solved by switching to full JAR compilation and relying on classpath snapshots to maintain cache hits. While that could work in principle, it would mean giving up some of the build optimizations we’ve already got in place – a trade-off that needs careful evaluation before making any changes.
For now, we’ve implemented a custom (yet suboptimal) solution that merges the newly generated ABI with the previous result. It gets the job done, but we’re still actively exploring better long-term alternatives.
Ideally, we’d be able to reuse the information already collected for classpath snapshot or, even better, have this kind of support built directly into the Kotlin compiler. There’s an open ticket for that: KT-62881. Fingers crossed!
Step 8: Testing
Measuring the impact of build changes is not an easy task. Benchmarking is great for getting a sense of a feature’s potential, but it doesn’t always reflect how things perform in “the real world.” Pre/post testing can help with that, but it’s tough to isolate the impact of a single change, especially when you’re not the only one pushing code.
We set up A/B testing to overcome these obstacles and measure the true impact of the Kotlin incremental compiler on Meta’s codebase with high confidence. It took a bit of extra work to keep the cache healthy across variants, but it gave us a clean, isolated view of how much difference the incremental compiler really made at scale.
We started with the largest modules – the ones we already knew were slowing builds the most. Given their size and known impact, we expected to see benefits quickly. And sure enough, we did.
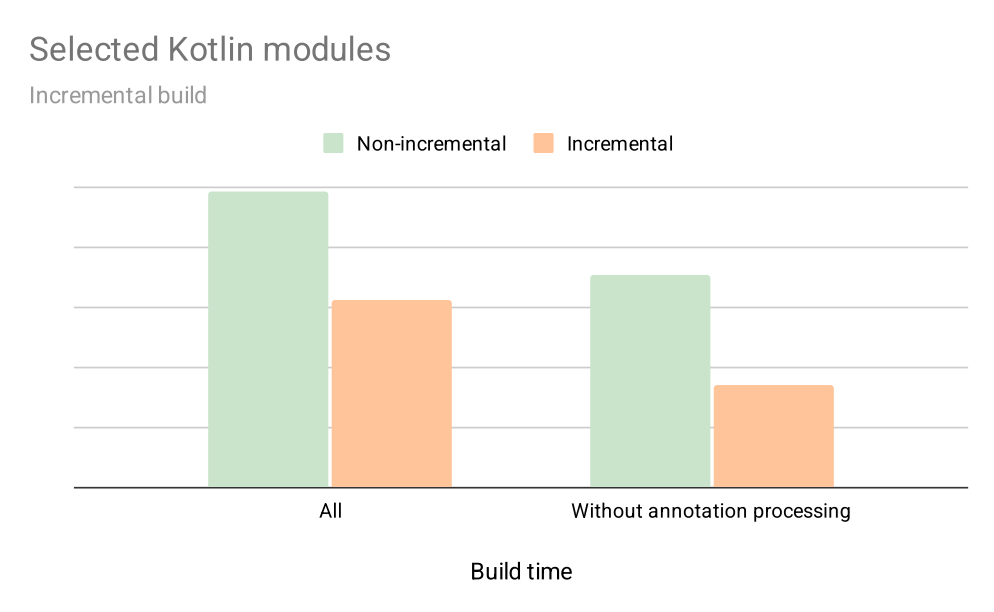
The impact of incremental compilation
The graph below shows early results on how enabling incremental compilation for selected targets impacts their local build times during incremental builds over a 4-week period. This includes not just compilation, but also annotation processing, and a few other optimisations we’ve added along the way.
With incremental compilation, we’ve seen about a 30% improvement for the average developer. And for modules without annotation processing, the speed nearly doubled. That was more than enough to convince us that the incremental compiler is here to stay.
What’s next
Kotlin incremental compilation is now supported in Buck2, and we’re actively rolling it out across our codebase! For now, it’s available for internal use only, but we’re working on bringing it to the recently introduced open source toolchain as well.
But that’s not all! We’re also exploring ways to expand incrementality across the entire Android toolchain, including tools like Kosabi (the Kotlin counterpart to Jasabi), to deliver even faster build times and even better developer experience.
To learn more about Meta Open Source, visit our open source site, subscribe to our YouTube channel, or follow us on Facebook, Threads, X and LinkedIn.
When Andy Jassy, then head of Amazon Web Services, announced Amazon Aurora in 2014, the pitch was bold but metered: Aurora would be a relational database built for the cloud. As such, it would provide access to cost-effective, fast, and scalable computing infrastructure.
In essence, he explained, Aurora would combine the cost effectiveness and simplicity of MySQL with the speed and availability of high-end commercial databases, the kind that firms typically managed on their own. In numbers, Aurora promised five times the throughput (e.g., the number of transactions, queries, read/write operations) of MySQL at one-tenth the price of commercial database solutions, all while offloading costly management challenges and maintaining performance and availability.
AWS re:Invent 2014 | Announcing Amazon Aurora for RDS
Aurora launched a year later, in 2015. Significantly, it decoupled computation from storage, a distinct contrast to traditional database architectures where the two are entwined. This fundamental innovation, along with automated backups and replication and other improvements, enabled easy scaling for both computational tasks and storage, while meeting reliability demands.
“Aurora’s design preserves the core transactional consistency strengths of relational databases. It innovates at the storage layer to create a database built for the cloud that can support modern workloads without sacrificing performance,” explained Werner Vogels, Amazon’s CTO, in 2019.
“To start addressing the limitations of relational databases, we reconceptualized the stack by decomposing the system into its fundamental building blocks,” Vogels said. “We recognized that the caching and logging layers were ripe for innovation. We could move these layers into a purpose-built, scale-out, self-healing, multitenant, database-optimized storage service. When we began building the distributed storage system, Amazon Aurora was born.”
Within two years, Aurora became the fastest-growing service in AWS history. Tens of thousands of customers — including financial-services companies, gaming companies, healthcare providers, educational institutions, and startups — turned to Aurora to help carry their workloads.
In the intervening years, Aurora has continued to evolve to suit the needs of a changing digital landscape. Most recently, in 2024, Amazon announced Aurora DSQL. A major step forward, Aurora DSQL is a serverless approach designed for global scale and enhanced adaptability to variable workloads.
Today, International Data Corporation (IDC) research estimates that firms using Aurora see a three-year return on investment of 434 percent and an operational cost reduction of 42 percent compared to other database solutions.
But what lies behind those figures? How did Aurora become so valuable to its users? To understand that, it’s useful to consider what came before.
A time for reinvention
In 2015, as cloud computing was gaining popularity, legacy firms began migrating workloads away from on-premises data centers to save money on capital investments and in-house maintenance. At the same time, mobile and web app startups were calling for remote, highly reliable databases that could scale in an instant. The theme was clear: computing and storage needed to be elastic and reliable. The reality was that, at the time, most databases simply hadn’t adapted to those needs.
Amazon engineers recognized that the cloud could enable virtually unlimited, networked storage and, separately, compute.
That rigidity makes sense considering the origin of databases and the problems they were invented to solve. The 1960s saw one of their earliest uses: NASA engineers had to navigate a complex list of parts, components, and systems as they built spacecraft for moon exploration. That need inspired the creation of the Information Management System, or IMS, a hierarchically structured solution that allowed engineers to more easily locate relevant information, such as the sizes or compatibilities of various parts and components. While IMS was a boon at the time, it was also limited. Finding parts meant engineers had to write batches of specially coded queries that would then move through a tree-like data structure, a relatively slow and specialized process.
In 1970, the idea of relational databases made its public debut when E. F. Codd coined the term. Relational databases organized data according to how it was related: customers and their purchases, for instance, or students in a class. Relational databases meant faster search, since data was stored in structured tables, and queries didn’t require special coding knowledge. With programming languages like SQL, relational databases became a dominant model for storing and retrieving structured data.
By the 1990s, however, that approach began to show its limits. Firms that needed more computing capabilities typically had to buy and physically install more on-premises servers. They also needed specialists to manage new capabilities, such as the influx of transactional workloads — as, for instance, when increasing numbers of customers added more and more pet supplies to virtual shopping carts. By the time AWS arrived in 2006, these legacy databases were the most brittle, least elastic component of a company’s IT stack.
The emergence of cloud computing promised a better way forward with more flexibility and remotely managed solutions. Amazon engineers recognized that the cloud could enable virtually unlimited, networked storage and, separately, computation.
The Amazon Relational Database Service (Amazon RDS) debuted in 2009 to help customers set up, operate, and scale a MySQL database in the cloud. And while that service expanded to include Oracle, SQL Server, and PostgreSQL, as Jeff Barr noted in a 2014 blog post, those database engines “were designed to function in a constrained and somewhat simplistic hardware environment.”
AWS researchers challenged themselves to examine those constraints and “quickly realized that they had a unique opportunity to create an efficient, integrated design that encompassed the storage, network, compute, system software, and database software”.
“The central constraint in high-throughput data processing has moved from compute and storage to the network,” wrote the authors of a SIGMOD 2017 paper describing Aurora’s architecture. Aurora researchers addressed that constraint via “a novel, service-oriented architecture”, one that offered significant advantages over traditional approaches. These included “building storage as an independent fault-tolerant and self-healing service across multiple data centers … protecting databases from performance variance and transient or permanent failures at either the networking or storage tiers.”’
The serverless era is now
In the years since its debut, Amazon engineers and researchers have ensured Aurora has kept pace with customer needs. In 2018, Aurora Serverless provided an on-demand autoscaling configuration that allowed customers to adjust computational capacity up and down based on their needs. Later versions further optimized that process by automatically scaling based on customer needs. That approach relieves the customer of the need to explicitly manage database capacity; customers need to specify only minimum and maximum levels.
Achieving that sort of “resource elasticity at high levels of efficiency” meant Aurora Serverless had to address several challenges, wrote the authors of a VLDB 2024 paper. “These included policy issues such as how to define ‘heat’ (i.e., resource usage features on which to base decision making)” and how to determine whether remedial action may be required. Aurora Serverless meets those challenges, the authors noted, by adapting and modifying “well-established ideas related to resource oversubscription; reactive control informed by recent measurements; distributed and hierarchical decision making; and innovations in the DB engine, OS, and hypervisor for efficiency.”
As of May 2025, all of Aurora’s offerings are now serverless. Customers no longer need to choose a specific server type or size or worry about the underlying hardware or operating system, patching, or backups; all that is completely managed by AWS. “One of the things that we’ve tried to design from the beginning is a database where you don’t have to worry about the internals,” Marc Brooker, AWS vice president and Distinguished Engineer, said at AWS re:Invent in 2024.
These are exactly the capabilities that Arizona State University needs, says John Rome, deputy chief information officer at ASU. Each fall, the university’s data needs explode when classes for its more than 73,000 students are in session across multiple campuses. Aurora lets ASU pay for the computation and storage it uses and helps it to adapt on the fly.
We see Amazon Aurora Serverless as a next step in our cloud maturity.
John Rome, deputy chief information officer at ASU
“We see Amazon Aurora Serverless as a next step in our cloud maturity,” Rome says, “to help us improve development agility while reducing costs on infrequently used systems, to further optimize our overall infrastructure operations.”
And what might the next step in maturity look like for the now 10-year-old Aurora service? The authors of that 2024 paper outlined several potential paths. Those include “introducing predictive techniques for live migration”; “exploiting statistical multiplexing opportunities stemming from complementary resource needs”, and “using sophisticated ML/RL-based techniques for workload prediction and decision making.”
-
Tools & Platforms3 weeks ago
Building Trust in Military AI Starts with Opening the Black Box – War on the Rocks
-

 Ethics & Policy1 month ago
Ethics & Policy1 month agoSDAIA Supports Saudi Arabia’s Leadership in Shaping Global AI Ethics, Policy, and Research – وكالة الأنباء السعودية
-

 Events & Conferences3 months ago
Events & Conferences3 months agoJourney to 1000 models: Scaling Instagram’s recommendation system
-

 Jobs & Careers2 months ago
Jobs & Careers2 months agoMumbai-based Perplexity Alternative Has 60k+ Users Without Funding
-

 Funding & Business2 months ago
Funding & Business2 months agoKayak and Expedia race to build AI travel agents that turn social posts into itineraries
-

 Education2 months ago
Education2 months agoVEX Robotics launches AI-powered classroom robotics system
-

 Podcasts & Talks2 months ago
Podcasts & Talks2 months agoHappy 4th of July! 🎆 Made with Veo 3 in Gemini
-

 Podcasts & Talks2 months ago
Podcasts & Talks2 months agoOpenAI 🤝 @teamganassi
-

 Mergers & Acquisitions2 months ago
Mergers & Acquisitions2 months agoDonald Trump suggests US government review subsidies to Elon Musk’s companies
-

 Jobs & Careers2 months ago
Jobs & Careers2 months agoAstrophel Aerospace Raises ₹6.84 Crore to Build Reusable Launch Vehicle