AI Insights
OU Enters Next Phase of AI Innovation

NORMAN, OKLA. – With roughly one-quarter of the University of Oklahoma’s research rooted in AI, OU is harnessing its transformative power across fields to drive real-world solutions and equip students to thrive as professionals and citizens amid rapid technological change. To expand AI-driven innovation at the university and further a commitment to providing students with a leading AI education, OU has named Shishir Shah, Ph.D., as the first university-wide Chief Artificial Intelligence Officer, pending OU Regents’ approval.
“The University of Oklahoma is at the forefront of harnessing artificial intelligence to solve complex problems and drive meaningful change,” said OU President Joseph Harroz Jr. “Through pioneering research and cross-disciplinary collaboration, we are transforming AI’s potential into powerful solutions that address critical global challenges. Dr. Shah’s appointment signals a bold step forward in strengthening this commitment and accelerating our leadership in the field.”
Shah’s arrival comes at a defining moment for the university, as OU deepens its focus on AI as a key priority of the “Lead On, University: The Next Phase” Strategic Plan. By advancing university-wide strategy in AI innovation, research, education and implementation, Shah will lead a charge to reimagine curriculum and academic opportunities to integrate AI across the student educational experience, guaranteeing that OU graduates enter the workforce as literate and responsible AI-users able to leverage the technology for maximum impact.
OU’s Data Institute for Societal Challenges, which develops convergent research teams to make advances in data science, AI and machine learning, recently announced the award of nearly $200,000 in pilot seed funding to 20 AI-focused projects touching on topics from legal education to clinical imaging reports.
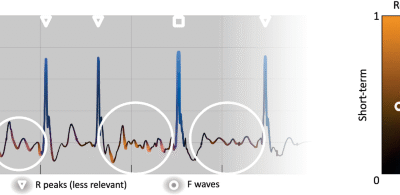
This new wave of activity builds on OU’s existing commitment to AI-enabled research. In health fields, university researchers are using AI to develop novel endoscopic optical imaging techniques, advance cardiac arrhythmia research and make genetic discoveries that could lead to future breakthroughs for personalized medicine. AI powers OU’s next-generation weather research, including pioneering all-digital polarimetric phased array radar. Student researchers are also deploying AI, including seniors in the School of Meteorology who dedicated their senior capstone work to researching explainable artificial intelligence and the formation of tornadoes, tackling the problem of severe weather that impacts Oklahomans every year.
Under Shah’s leadership, OU is poised to strengthen its role at the forefront of ethical and transformative uses of AI, expanding its global impact and capacity to address society’s most complex challenges.
Shah’s research expertise concentrates on computer vision and machine learning, and he is an expert in person re-identification, human motion and behavior analysis, and microscope image analysis. His recent work addresses real-world AI challenges, pushing the boundaries of adaptive, intelligent systems in complex environments.
Shah comes to OU from the University of Houston, where he served as Professor and Chair of the Department of Computer Science. He founded and led UH’s Quantitative Imaging Laboratory, which focuses on developing advanced image and video analysis tools that support complex decision making. He earned a B.S. in mechanical engineering, M.S. and Ph.D. in electrical and computer engineering from the University of Texas at Austin. Prior to joining the University of Houston in 2005, he served as a faculty member at Wayne State University before transitioning to leadership roles in two startup companies.
In addition to this appointment, Shah will join the Gallogly College of Engineering as Director of the School of Computer Science. He will report jointly to the Senior Vice President and Provost of both the OU Norman and OU Health Sciences campuses.

















Chinese chipmakers are trading at a four-year high versus their US peers, but a top fund manager still sees pockets of opportunity among their equipment suppliers.
Source link
AI Insights
Deep computer vision with artificial intelligence based sign language recognition to assist hearing and speech-impaired individuals

This study proposes a novel HHODLM-SLR technique. The presented HHODLM-SLR technique mainly concentrates on the advanced automatic detection and classification of SL for disabled people. This technique comprises BF-based image pre-processing, ResNet-152-based feature extraction, BiLSTM-based SLR, and HHO-based hyperparameter tuning. Figure 1 represents the workflow of the HHODLM-SLR model.
Image Pre-preprocessing
Initially, the HHODLM-SLR approach utilized BF to eliminate noise in an input image dataset38. This model is chosen due to its dual capability to mitigate noise while preserving critical edge details, which is crucial for precisely interpreting complex hand gestures. Unlike conventional filters, such as Gaussian or median filtering, that may blur crucial features, BF maintains spatial and intensity-based edge sharpness. This confirms that key contours of hand shapes are retained, assisting improved feature extraction downstream. Its nonlinear, content-aware nature makes it specifically efficient for complex visual patterns in sign language datasets. Furthermore, BF operates efficiently and is adaptable to varying lighting or background conditions. These merits make it an ideal choice over conventional pre-processing techniques in this application. Figure 2 represents the working flow of the BF model.

BF is a nonlinear image processing method employed for preserving edges, whereas decreasing noise in images makes it effective for pre-processing in SLR methods. It smoothens the image by averaging pixel strengths according to either spatial proximity or intensity similarities, guaranteeing that edge particulars are essential for recognizing hand movements and shapes remain unchanged. This is mainly valued in SLR, whereas refined edge features and hand gestures are necessary for precise interpretation. By utilizing BF, noise from environmental conditions, namely background clutter or lighting variations, is reduced, improving the clearness of the input image. This pre-processing stage helps increase the feature extraction performance and succeeding detection phases in DL methods.
Feature extraction using ResNet-152 model
The HHODLM-SLR technique implements the ResNet152 model for feature extraction39. This model is selected due to its deep architecture and capability to handle vanishing gradient issues through residual connections. This technique captures more complex and abstract features that are significant for distinguishing subtle discrepancies in hand gestures compared to standard deep networks or CNNs. Its 152-layer depth allows it to learn rich hierarchical representations, enhancing recognition accuracy. The skip connections in ResNet improve gradient flow and enable enhanced training stability. Furthermore, it has proven effectualness across diverse vision tasks, making it a reliable backbone for SL recognition. This depth, performance, and robustness integration sets it apart from other feature extractors. Figure 3 illustrates the flow of the ResNet152 technique.
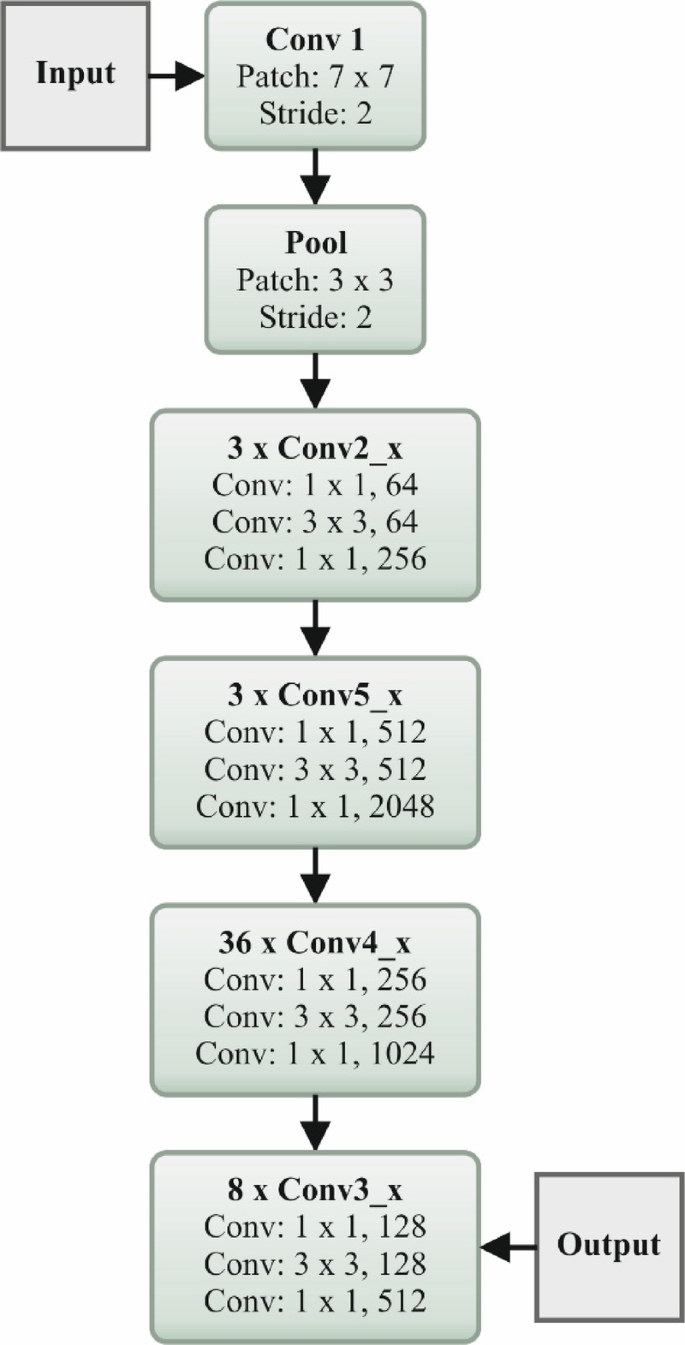
Workflow of the ResNet152 model.
The renowned deep residual network ResNet152 is applied as the pre-trained system in deep convolutional neural networks (DCNN) during this classification method. This technique is responsible for handling the problem of vanishing gradients. Then, the ResNet152 output is transferred to the SoftMax classifier (SMC) in the classification procedure. The succeeding part covers the process of categorizing and identifying characteristics. The fully connected (FC) layer, convolution layer (CL), and downsampling layers (DSL) are some of the most general layers that constitute a DCNN (FCL). The networking depth of DL methods plays an essential section in the model of attaining increased classifier outcomes. Later, for particular values, once the CNN is made deeper, the networking precision starts to slow down; however, persistence decreases after that. The mapping function is added in ResNet152 to reduce the influence of degradation issues.
$$\:W\left(x\right)=K\left(x\right)+x$$
(1)
Here, \(\:W\left(x\right)\) denotes the function of mapping built utilizing a feedforward NN together with SC. In general, SC is the identity map that is the outcome of bypassing similar layers straight, and \(\:K(x,\:{G}_{i})\) refers to representations of the function of residual maps. The formulation is signified by Eq. (2).
$$\:Z=K\left(x,\:{G}_{i}\right)+x$$
(2)
During the CLs of the ResNet method, \(\:3\text{x}3\) filtering is applied, and the down-sampling process is performed by a stride of 2. Next, short-cut networks were added, and the ResNet was built. An adaptive function is applied, as presented by Eq. (3), to enhance the dropout’s implementation now.
$$\:u=\frac{1}{n}{\sum\:}_{i=1}^{n}\left[zlog{(S}_{i})+\left(1-z\right)log\left(1-{S}_{i}\right)\right]$$
(3)
Whereas \(\:n\) denotes training sample counts, \(\:u\) signifies the function of loss, and \(\:{S}_{i}\) represents SMC output, the SMC is a kind of general logistic regression (LR) that might be applied to numerous class labels. The SMC outcomes are presented in Eq. (4).
$$\:{S}_{i}=\frac{{e}^{{l}_{k}}}{{\varSigma\:}_{j=1}^{m}{e}^{{y}_{i}}},\:k=1,\:\cdots\:,m,\:y={y}_{1},\:\cdots\:,\:{y}_{m}$$
(4)
In such a case, the softmax layer outcome is stated. \(\:{l}_{k}\) denotes the input vector component and \(\:l,\) \(\:m\) refers to the total neuron counts established in the output layer. The presented model uses 152 10 adaptive dropout layers (ADLs), an SMC, and convolutional layers (CLs).
SLR using Bi-LSTM technique
The Bi-LSTM model employs the HHODLM-SLR methodology for performing the SLR process40. This methodology is chosen because it can capture long-term dependencies in both forward and backward directions within gesture sequences. Unlike unidirectional LSTM or conventional RNNs, Bi-LSTM considers past and future context concurrently, which is significant for precisely interpreting the temporal flow of dynamic signs. This bidirectional learning enhances the model’s understanding of gesture transitions and co-articulation effects. Its memory mechanism effectually handles variable-length input sequences, which is common in real-world SLR scenarios. Bi-LSTM outperforms static classifiers like CNNs or SVMs when dealing with sequential data, making it highly appropriate for recognizing time-based gestures. Figure 4 specifies the Bi-LSTM method.
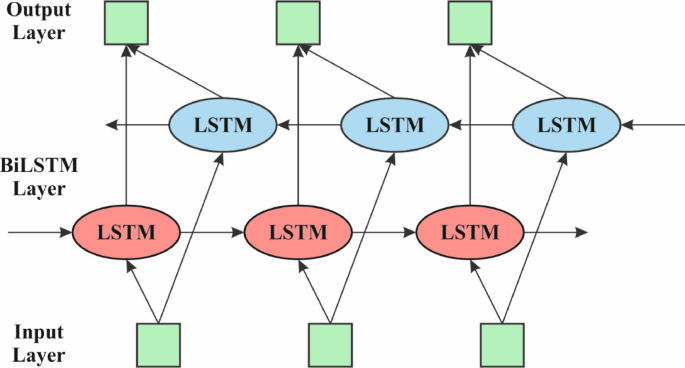
Architecture of Bi-LSTM method.
The presented DAE-based approach for removing the feature is defined here. Additionally, Bi-LSTM is applied to categorize the data. The model to solve classification problems consists of the type of supervised learning. During this method, the Bi‐LSTM classification techniques are used to estimate how the proposed architecture increases the performance of the classification. A novel RNN learning model is recommended to deal with this need, which may enhance the temporal organization of the structure. By the following time stamp, the output is immediately fed reverse itself\(\:.\) RNN is an approach that is often applied in DL. Nevertheless, RNN acquires a slanting disappearance gradient exploding problem. At the same time, the memory unit in the LSTM can choose which data must be saved in memory and at which time it must be deleted. Therefore, LSTM can effectively deal with the problems of training challenges and gradient disappearance by mine time-series with intervals in the time-series and relatively larger intervals. There are three layers in a standard LSTM model architecture: hidden loop, output, and input. The cyclic HL, by comparison with the traditional RNN, generally contains neuron nodes. Memory units assist as the initial module of the LSTM cyclic HLs. Forget, input and output gates are the three adaptive multiplication gate components enclosed in this memory unit. All neuron nodes of the LSTM perform the succeeding computation: The input gate was fixed at \(\:t\:th\) time according to the output result \(\:{h}_{t-1}\) of the component at the time in question and is specified in Eq. (5). The input \(\:{x}_{t}\) accurate time is based on whether to include a computation to upgrade the present data inside the cell.
$$\:{i}_{t}={\upsigma\:}\left({W}_{t}\cdot\:\left[{h}_{t-1},\:{x}_{t}\right]+{b}_{t}\right)$$
(5)
A forget gate defines whether to preserve or delete the data according to the additional new HL output and the present-time input specified in Eq. (6).
$$\:{f}_{\tau\:}={\upsigma\:}\left({W}_{f}\cdot\:\left[{h}_{t-1},{x}_{\tau\:}\right]+{b}_{f}\right)$$
(6)
The preceding output outcome \(\:{h}_{t-1}\) of the HL-LSTM cell establishes the value of the present candidate cell of memory and the present input data \(\:{x}_{t}\). * refers to element-to-element matrix multiplication. The value of memory cell state \(\:{C}_{t}\) adjusts the present candidate cell \(\:{C}_{t}\) and its layer \(\:{c}_{t-1}\) forget and input gates. These values of the memory cell layer are provided in Eq. (7) and Eq. (8).
$$\:{\overline{C}}_{\text{t}}=tanh\left({W}_{C}\cdot\:\left[{h}_{t-1},\:{x}_{t}\right]+{b}_{C}\right)$$
(7)
$$\:{C}_{t}={f}_{t}\bullet\:{C}_{t-1}+{i}_{t}\bullet\:\overline{C}$$
(8)
Output gate \(\:{\text{o}}_{t}\) is established as exposed in Eq. (9) and is applied to control the cell position value. The last cell’s outcome is \(\:{h}_{t}\), inscribed as Eq. (10).
$$\:{o}_{t}={\upsigma\:}\left({W}_{o}\cdot\:\left[{h}_{t-1},\:{x}_{t}\right]+{b}_{o}\right)$$
(9)
$$\:{h}_{t}={\text{o}}_{t}\bullet\:tanh\left({C}_{t}\right)$$
(10)
The forward and backward LSTM networks constitute the BiLSTM. Either the forward or the backward LSTM HLs are responsible for removing characteristics; the layer of forward removes features in the forward directions. The Bi-LSTM approach is applied to consider the effects of all features before or after the sequence data. Therefore, more comprehensive feature information is developed. Bi‐LSTM’s present state comprises either forward or backward output, and they are specified in Eq. (11), Eq. (12), and Eq. (13)
$$\:h_{t}^{{forward}} = LSTM^{{forward}} (h_{{t – 1}} ,\:x_{t} ,\:C_{{t – 1}} )$$
(11)
$$\:{h}_{\tau\:}^{backwar\text{d}}=LST{M}^{backwar\text{d}}\left({h}_{t-1},{x}_{t},\:{C}_{t-1}\right)$$
(12)
$$\:{H}_{T}={h}_{t}^{forward},\:{h}_{\tau\:}^{backwar\text{d}}$$
(13)
Hyperparameter tuning using the HHO model
The HHO methodology utilizes the HHODLM-SLR methodology for accomplishing the hyperparameter tuning process41. This model is employed due to its robust global search capability and adaptive behaviour inspired by the cooperative hunting strategy of Harris hawks. Unlike grid or random search, which can be time-consuming and inefficient, HHO dynamically balances exploration and exploitation to find optimal hyperparameter values. It avoids local minima and accelerates convergence, enhancing the performance and stability of the model. Compared to other metaheuristics, such as PSO or GA, HHO presents faster convergence and fewer tunable parameters. Its bio-inspired nature makes it appropriate for complex, high-dimensional optimization tasks in DL models. Figure 5 depicts the flow of the HHO methodology.
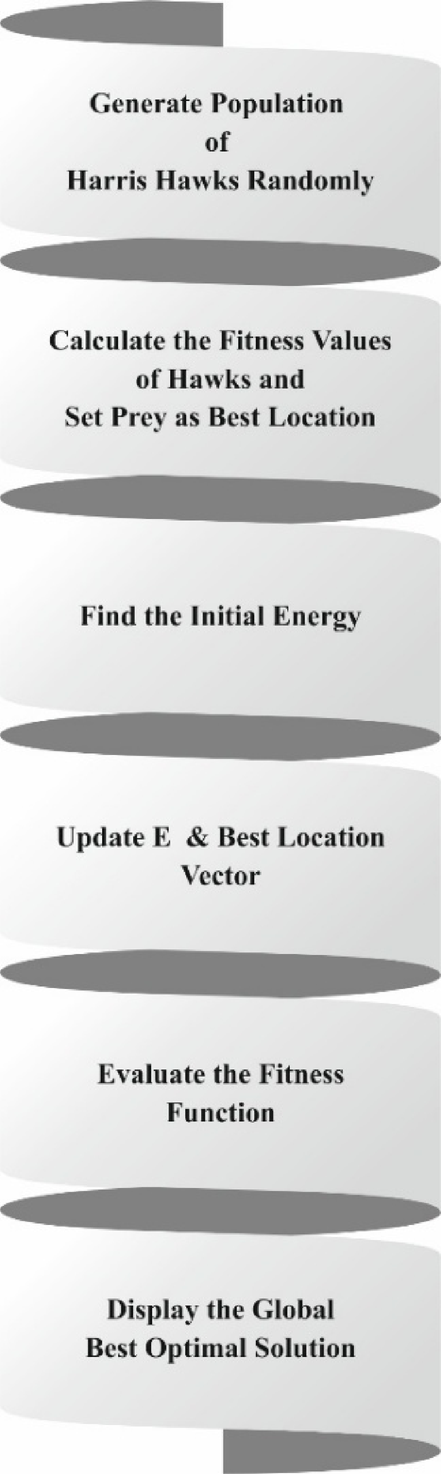
Workflow of the HHO technique.
The HHO model is a bio-inspired technique depending on Harris Hawks’ behaviour. This model was demonstrated through the exploitation or exploration levels. At the exploration level, the HHO may track and detect prey with its effectual eyes. Depending upon its approach, HHO can arbitrarily stay in a few positions and wait to identify prey. Suppose there is an equal chance deliberated for every perched approach depending on the family member’s position. In that case, it might be demonstrated as condition \(\:q<0.5\) or landed at a random position in the trees as \(\:q\ge\:0.5\), which is given by Eq. (14).
$$\:X\left(t+1\right)=\left\{\begin{array}{l}{X}_{rnd}\left(t\right)-{r}_{1}\left|{X}_{rnd}\left(t\right)-2{r}_{2}X\left(t\right)\right|,\:q\ge\:0.5\\\:{X}_{rab}\left(t\right)-{X}_{m}\left(t\right)-r3\left(LB+{r}_{4}\left(UB-LB\right)\right),q<0.5\end{array}\right.$$
(14)
The average location is computed by the Eq. (15).
$$\:{X}_{m}\left(t\right)=\frac{1}{N}{\sum\:}_{i=1}^{N}{X}_{i}\left(t\right)$$
(15)
The movement from exploration to exploitation, while prey escapes, is energy loss.
$$\:E=2{E}_{0}\left(1-\frac{t}{T}\right)$$
(16)
The parameter \(\:E\) signifies the prey’s escape energy, and \(\:T\) represents the maximum iteration counts. Conversely, \(\:{E}_{0}\) denotes a random parameter that swings among \(\:(-\text{1,1})\) for every iteration.
The exploitation level is divided into hard and soft besieges. The surroundings \(\:\left|E\right|\ge\:0.5\) and \(\:r\ge\:0.5\) should be met in a soft besiege. Prey aims to escape through certain arbitrary jumps but eventually fails.
$$\:\begin{array}{c}X\left(t+1\right)=\Delta X\left(t\right)-E\left|J{X}_{rabb}\left(t\right)-X\left(t\right)\right|\:where\\\:\Delta X\left(t\right)={X}_{rabb}\left(t\right)-X\left(t\right)\end{array}$$
(17)
\(\:\left|E\right|<0.5\) and \(\:r\ge\:0.5\) should meet during the hard besiege. The prey attempts to escape. This position is upgraded based on the Eq. (18).
$$\:X\left(t+1\right)={X}_{rabb}\left(t\right)-E\left|\varDelta\:X\left(t\right)\right|$$
(18)
The HHO model originates from a fitness function (FF) to achieve boosted classification performance. It outlines an optimistic number to embody the better outcome of the candidate solution. The minimization of the classifier error ratio was reflected as FF. Its mathematical formulation is represented in Eq. (19).
$$\begin{gathered} fitness\left( {x_{i} } \right) = ClassifierErrorRate\left( {x_{i} } \right)\: \hfill \\ \quad \quad \quad \quad \quad\,\,\, = \frac{{number\:of\:misclassified\:samples}}{{Total\:number\:of\:samples}} \times \:100 \hfill \\ \end{gathered}$$
(19)

-

 Business3 days ago
Business3 days agoThe Guardian view on Trump and the Fed: independence is no substitute for accountability | Editorial
-
Tools & Platforms3 weeks ago
Building Trust in Military AI Starts with Opening the Black Box – War on the Rocks
-

 Ethics & Policy1 month ago
Ethics & Policy1 month agoSDAIA Supports Saudi Arabia’s Leadership in Shaping Global AI Ethics, Policy, and Research – وكالة الأنباء السعودية
-

 Events & Conferences3 months ago
Events & Conferences3 months agoJourney to 1000 models: Scaling Instagram’s recommendation system
-

 Jobs & Careers2 months ago
Jobs & Careers2 months agoMumbai-based Perplexity Alternative Has 60k+ Users Without Funding
-

 Funding & Business2 months ago
Funding & Business2 months agoKayak and Expedia race to build AI travel agents that turn social posts into itineraries
-

 Education2 months ago
Education2 months agoVEX Robotics launches AI-powered classroom robotics system
-

 Podcasts & Talks2 months ago
Podcasts & Talks2 months agoHappy 4th of July! 🎆 Made with Veo 3 in Gemini
-

 Mergers & Acquisitions2 months ago
Mergers & Acquisitions2 months agoDonald Trump suggests US government review subsidies to Elon Musk’s companies
-

 Podcasts & Talks2 months ago
Podcasts & Talks2 months agoOpenAI 🤝 @teamganassi